相机视觉基础
1. 相机参数
1.1 分辨率(Resolution)
指相机一次采集图像的像素点数,也可理解为传感器上感光单元的数量。分辨率越高,图像细节越丰富。
1.2 传感器尺寸(Sensor Size)
决定相机的成像视野大小,常见尺寸有 1/3”、1/2”、2/3”、1” 等。
1.3 像元尺寸(Pixel Size)
单个像素感光单元的尺寸。尺寸越大,感光能力越强,信噪比越高,图像质量更好。
公式:
\[ \text{像元尺寸} = \frac{\text{传感器尺寸}}{\text{分辨率(像素个数)}} \]
1.4 图像精度(Accuracy)
指一个像素代表的实际物理尺寸,常用单位:μm/pixel。
公式:
\[ \text{精度} = \frac{\text{视野(FOV)}}{\text{分辨率}} \]
- 背光源应用:推荐精度为 1–3 像素
- 正光源应用:推荐精度为 3–5 像素
1.5 ISO
表示图像传感器对光的灵敏度。
- 实际上 ISO 调整的是光电信号的放大倍数,并非传感器本身的灵敏度。
- ISO 过高会引入噪点,降低图像质量。
2. 镜头参数
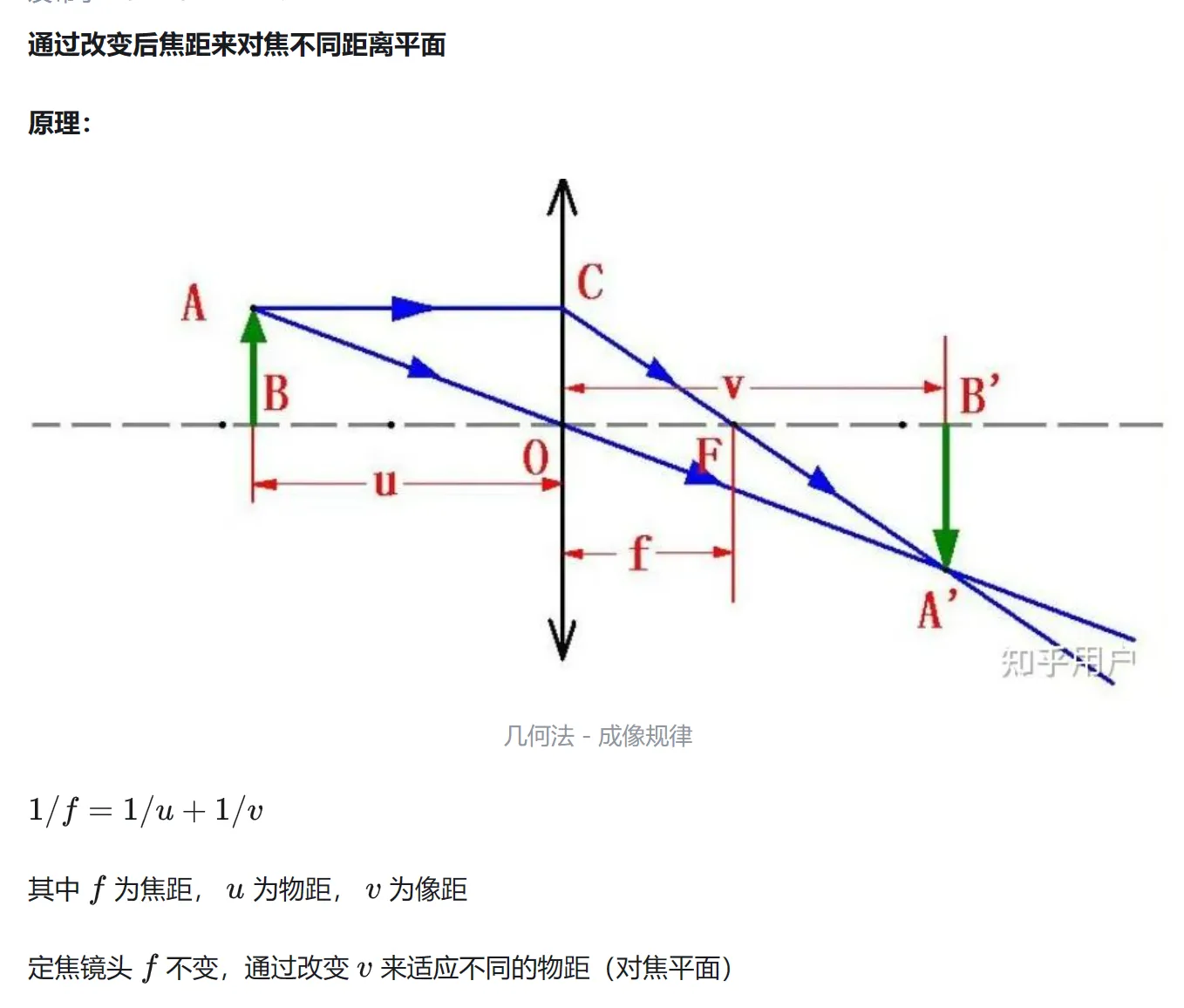
2.1 焦距(Focal Length, f)
焦距决定成像比例与视场范围。
- 物距 > 2f:像距在 f–2f 之间,成 倒立缩小实像(照相机成像)。
- f < 物距 < 2f:像距 > 2f,成 倒立放大实像(幻灯机、微距拍摄)。
- 物距 < f:像距为负,在物体同侧成 正立放大虚像(放大镜)。
定焦镜头的对焦环实质上调整的是像距。
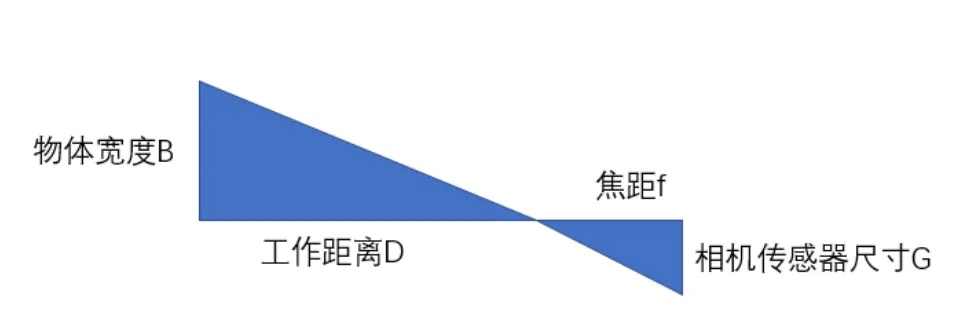
2.2 视场角(Field of View, FOV)
镜头可覆盖的最大成像范围,取决于 镜头焦距 与 传感器尺寸。
2.3 光圈(Aperture, f-number, F)
光圈大小用 F 值 表示:
\[ F = \frac{f}{D} \]
其中 f 为焦距,D 为入瞳直径。
- F 值越小 → 光圈越大 → 进光量越多。
- F 值越大 → 光圈越小 → 进光量越少。
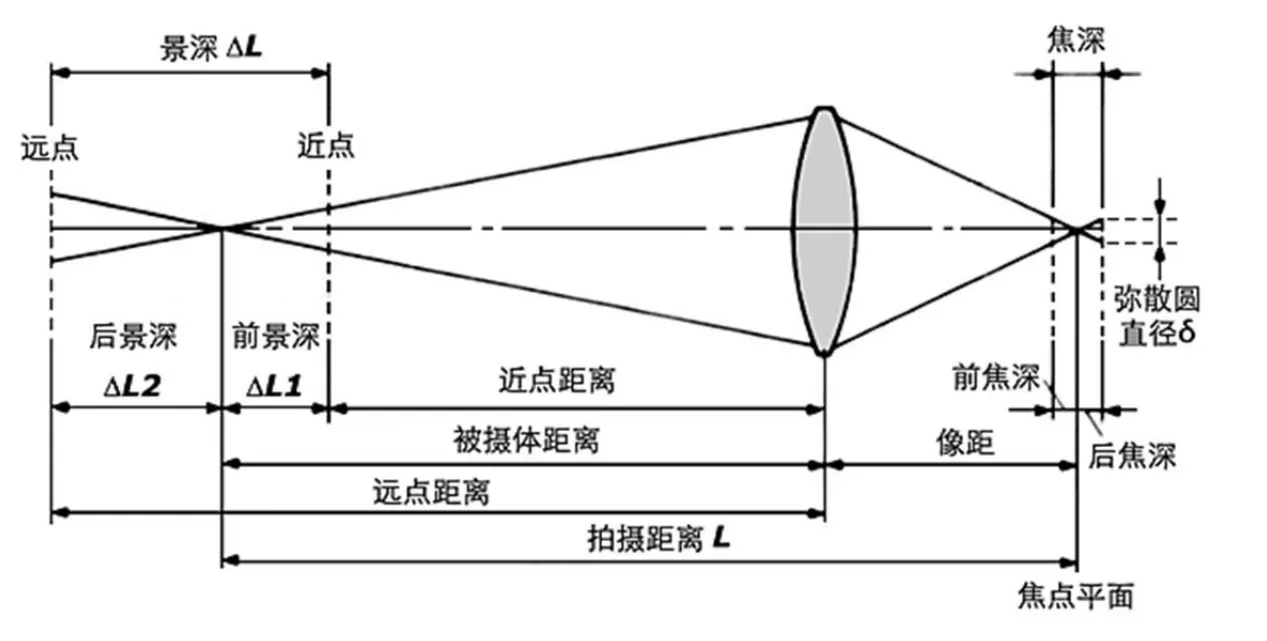
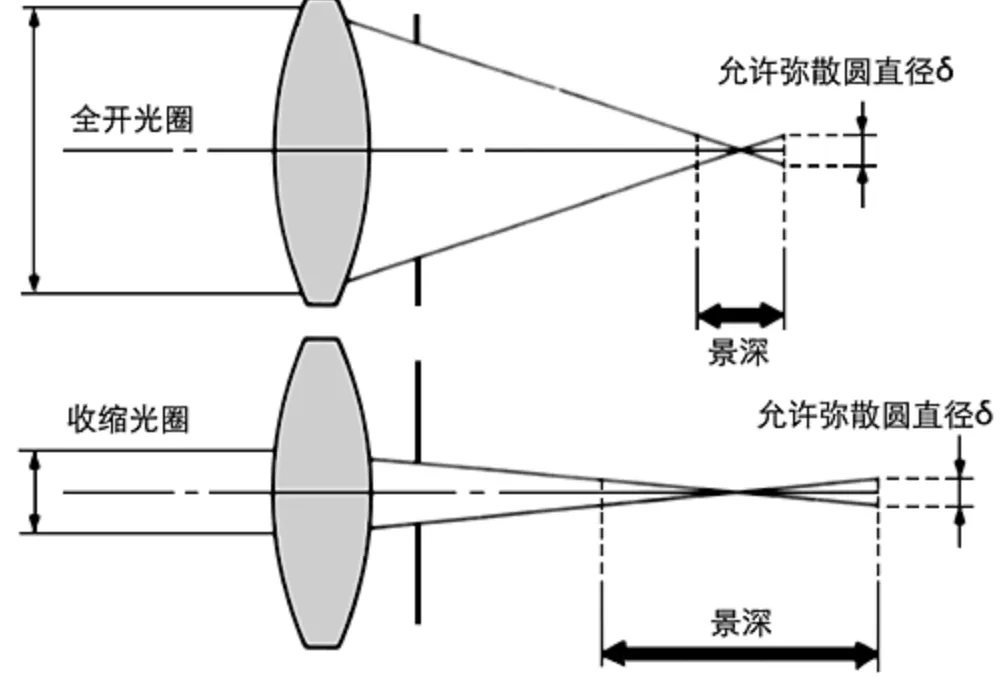
2.4 景深(Depth of Field, DOF)
景深表示在一定清晰度范围内,被摄体前后可接受的成像范围。
- 本质:只有一个平面真正处于合焦状态,其他位置形成“弥散圆”(Circle of Confusion)。
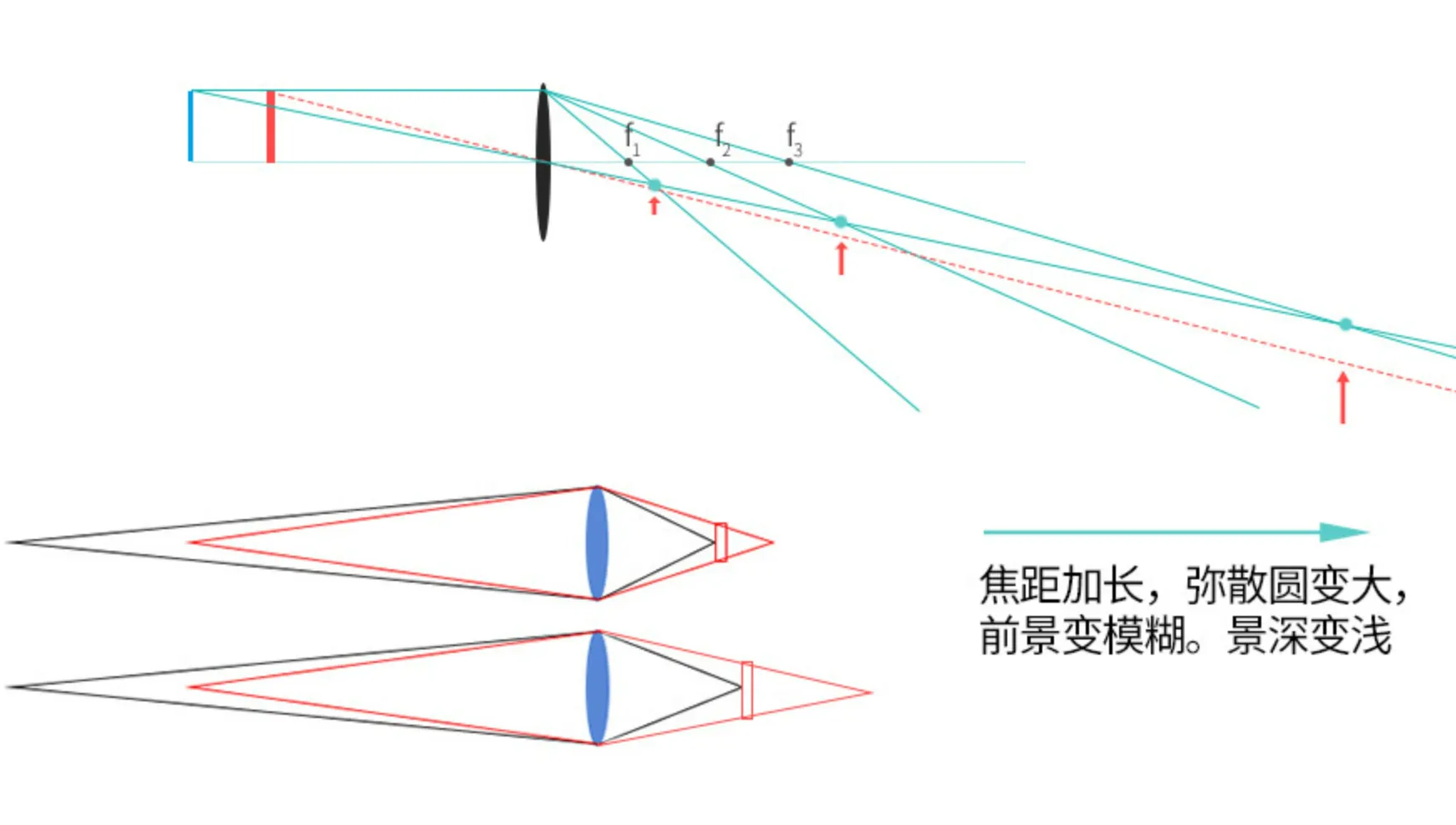
- 影响因素:
- 光圈大小:景深与光圈近似 成反比(光圈越大,景深越小)。
- 焦距:景深与 焦距平方成反比(焦距越长,景深越小,影响比光圈更显著)。
- 物距:景深与 物距平方成正比(物体越远,景深越大)。
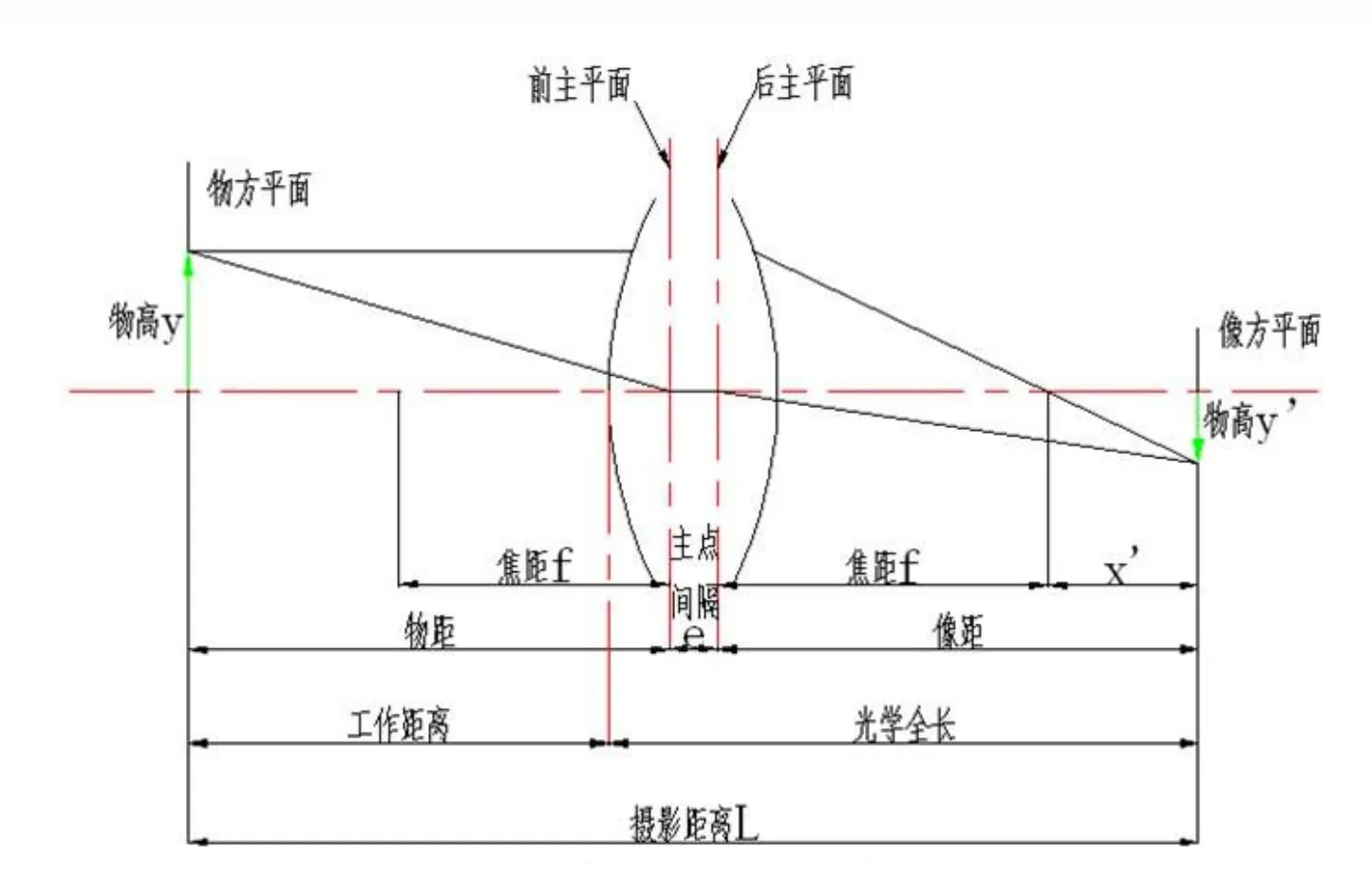
2.5 工作距离(Working Distance, WD)
指镜头最前端到被摄物体的距离。工作距离过小可能导致安装受限。